Ever stepped away from your desk for two minutes, only to return to find your cat has typed random characters in your workspace? Yeah, me too. My cat thinks my table is the perfect place to nap, my mouse is a toy, and other objects are obstacle to be eliminated.
Motion sensors? They trigger on everything. Manual supervision? Not exactly practical when you're not around. What I needed was something smarter-a system that could tell the difference between me grabbing a pen and a cat jumping onto my desk.
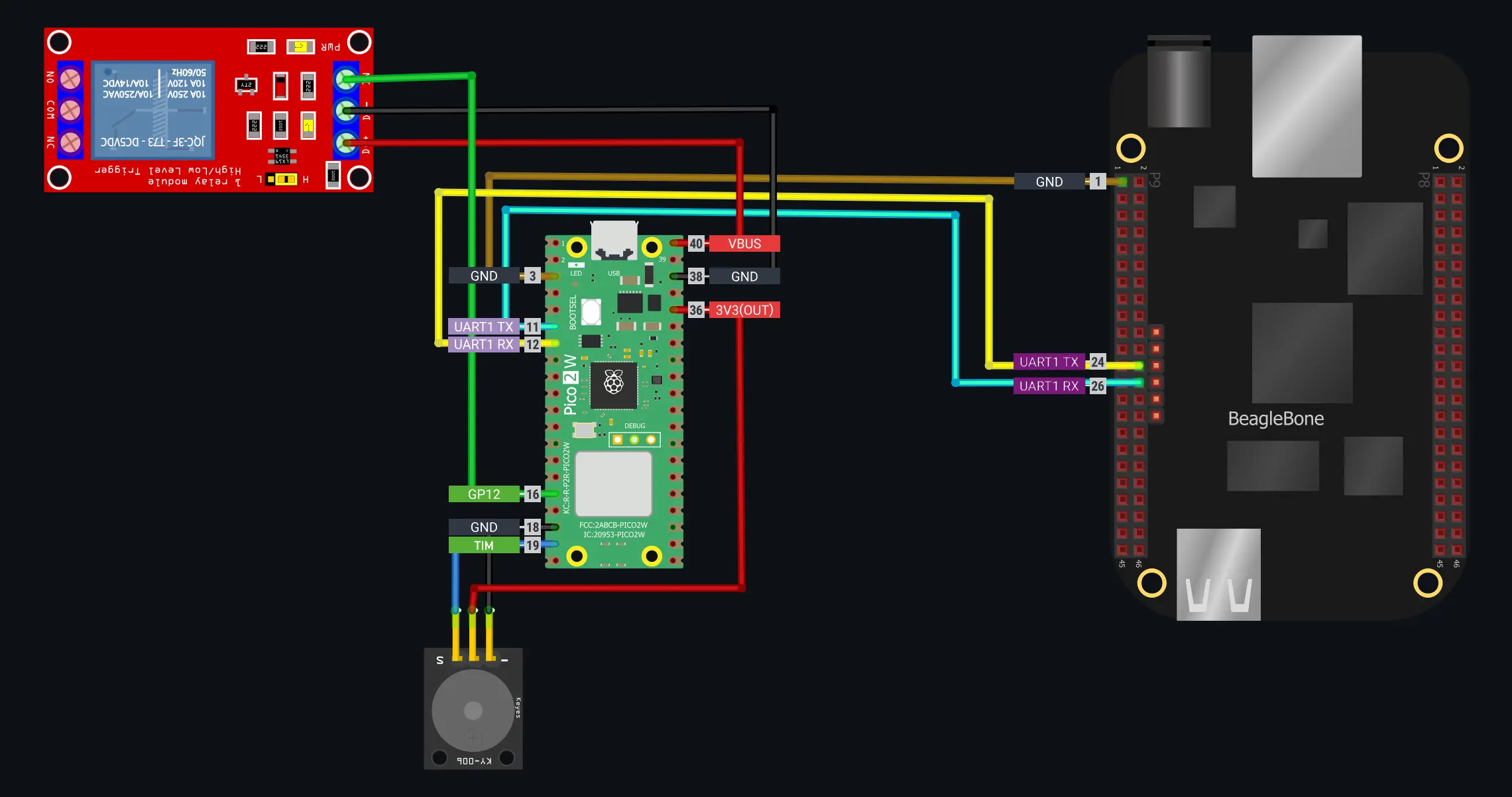
So I built PetWatch: an embedded system that uses computer vision to detect motion, AI to identify if it's actually a pet, and automated deterrents (water spray + alarm) to teach them to stay away. The system runs on three devices working together: BeagleBone Black for vision, Raspberry Pi Pico 2W for networking and control, and a detection server running YOLOv5 for accurate AI identification.
Project Goal: Build a system reliable enough to run constantly, smart enough to distinguish pets from humans and capable of threatening the cats.